
LiGrip O2
歩くだけで、世界をデジタル化する
次世代ハンドヘルドSLAM LiGrip O2
そしてGNSSアンテナを一台に集約したオールインワン・デバイスです。
独自のマルチセンサー・フュージョン技術(MLF-SLAM)により
GNSSの届かない屋内から、特徴の少ない屋外環境まで、高精度な全方向データ取得を可能にします。
特徴
マルチセンサー統合による圧倒的な安定性
LiDAR、カメラ、GNSSが高度に連携。トンネルや海岸線など、従来のSLAMが苦手としていた環境でもロストしにくい安定したスキャンを実現します。
マルチプラットフォーム対応(1台4役)
手持ちスキャンだけでなく、専用マウントによりバックパック、車載、ドローンへの搭載が可能。現場の状況に合わせた最適な手法を選択できます。
高解像度360°カラー点群と3DGS対応
3台のパノラマカメラが死角のない鮮明な画像を取得。美しいカラー点群の生成はもちろん、最新の3D Gaussian Splatting(3DGS)用データの取得にも最適です。
シンプルで直感的なワークフロー
取得したデータは、専用ソフトウェアへのドラッグ&ドロップを中心としたシンプルな操作で処理可能。解析時間を大幅に短縮します。
メリット効果
計測の安定性
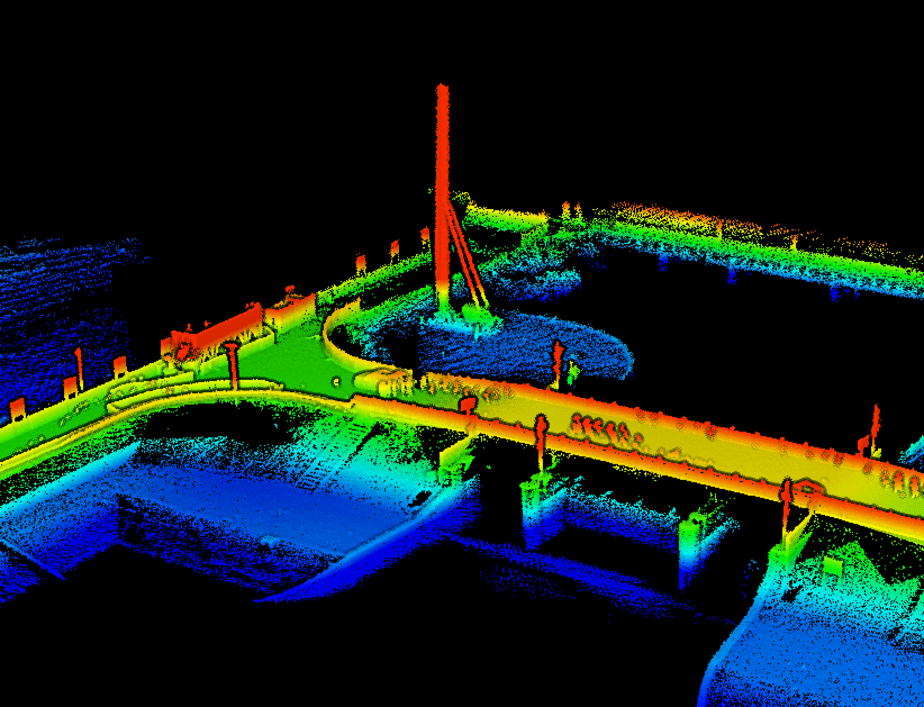
特徴の少ない環境でもロストなし 独自のMLF-SLAMアルゴリズムとLiDAR+カメラ+GNSSの連携により、トンネルや橋梁下、海岸線などでも安定してスキャンを継続できます。
抜群の凡用性
視覚的訴求力
高解像度パノラマカラー点群 3台の12MPカメラが360°映像を取得。鮮明なカラー点群に加え、最新の3DGS技術により写真のようにリアルな3Dモデルを作成可能です。
現場投入を最適化する、高機動マルチデバイス構成
ハンドヘルド・モード
バックパック・モード
テレスコピックポール

室内、狭い通路、階段、複雑な構造物など、歩行者が入れるあらゆる場所で手軽にデータ取得が可能です 。

両手が自由になるため安全性が向上し、重量負担も軽減されます。また、手持ちよりも高い位置にセンサーを固定できるため、より広範囲を安定してスキャンできます。

バックパックと同様にハンズフリーでの運用が可能でありながら、常にセンサーの状態や進行方向の死角を最小限に抑えた計測が可能です。
データが必要な「すべての場所」が、あなたのフィールドになる
LiGrip O2の優位性
「色」と「形状」の
完璧な融合
オールインワン
プラットフォーム
『実世界でのSLAMの応用事例』
「誰でも・どこでも・短時間で」高精度な3D空間情報を取得できる点にあります。
LiGrip O2のようなマルチセンサー統合型デバイスは、
特に「特徴の少ない場所」や「広い屋外」での安定性を高めたことでこれまで
諦めていた現場でのSLAM活用を可能にしました。
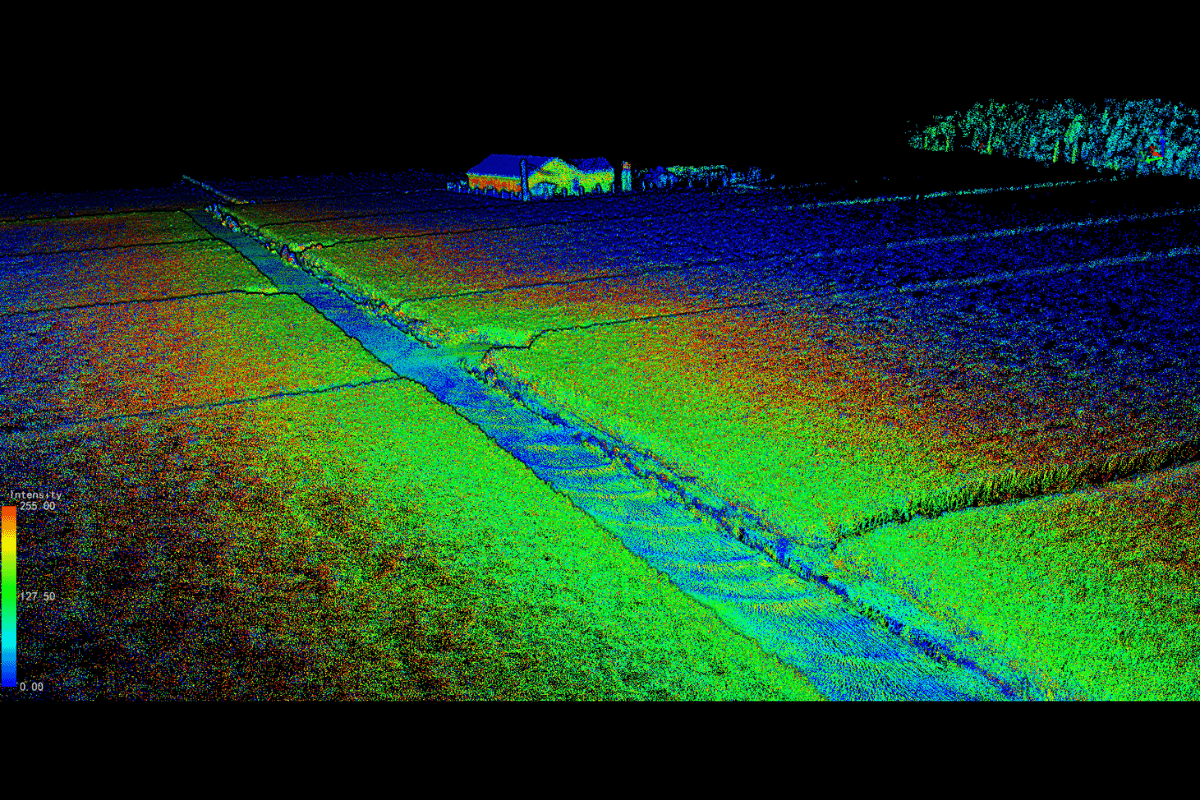
樹木一本一本の分離・解析。
土木
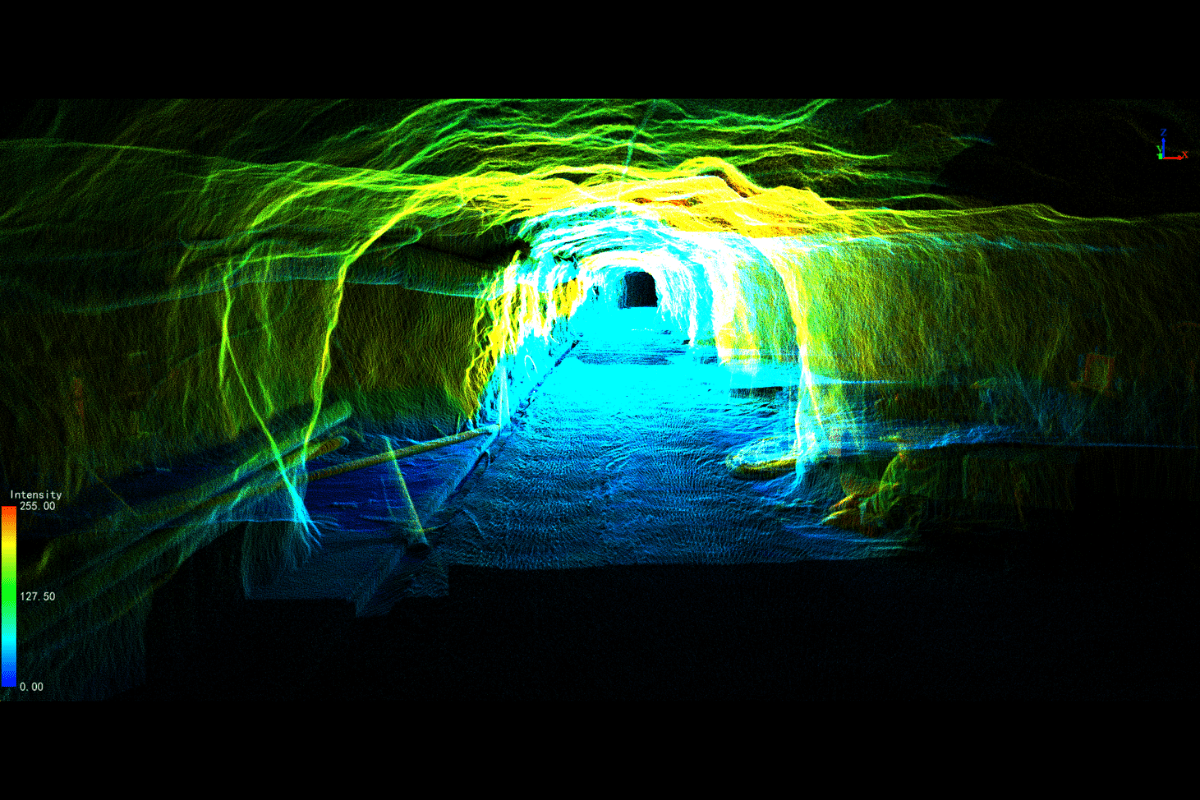
トンネル内部や崖地の測量。
建築
BIF/CIMに向けた既存建物の3Dデータ化。

製品スペック
相対精度: 1 cm未満(Liteは2 cm未満)
繰り返し精度: 2 cm未満
保護等級: IP64(防塵・防滴)
ストレージ: 512GB SSD内蔵
動作時間: 約120分(1バッテリーあたり)
LiGrip O2
収集から解析まで、ワンストップ
●GreenValley APP: 現場でリアルタイムに点群を確認。データの欠落をその場で防ぐ、インテリジェントなフィールドモニター。
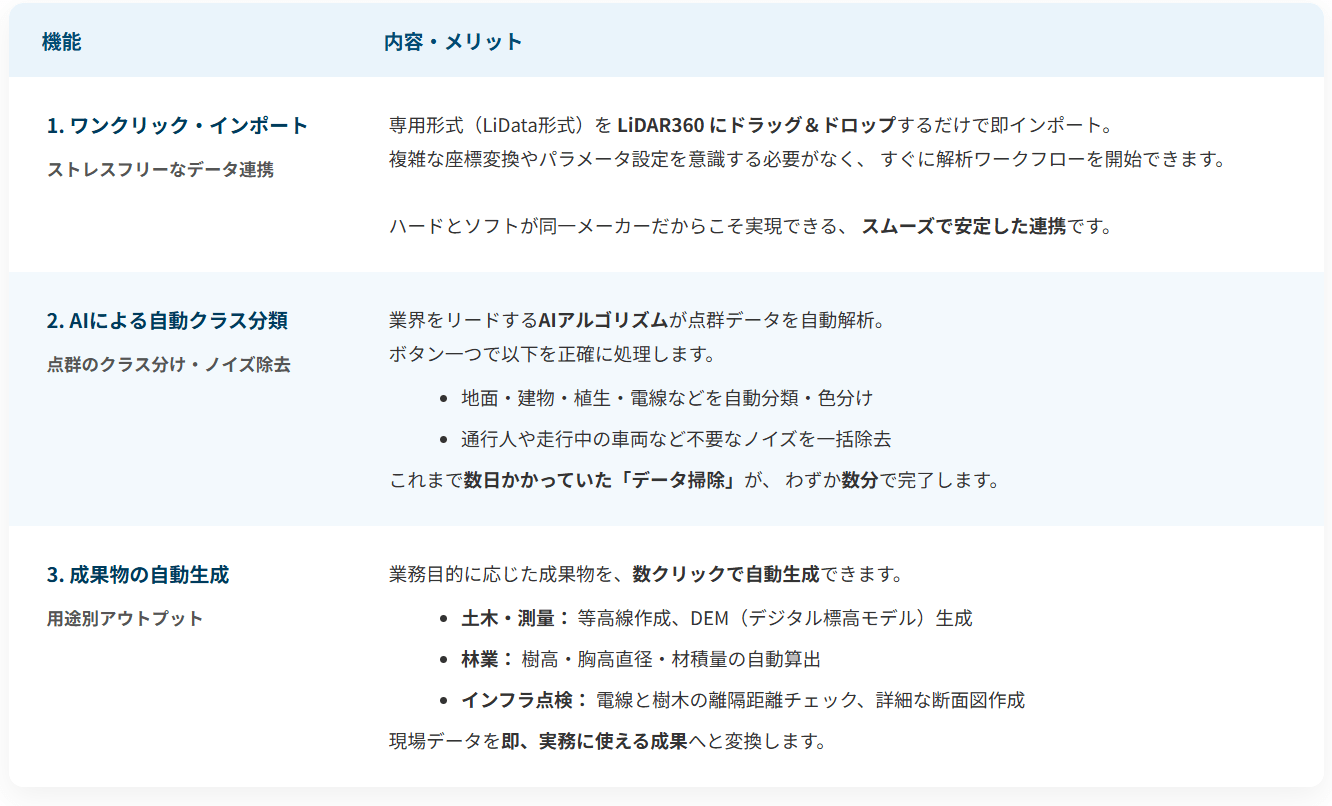
● LiDAR360: 業界標準の解析プラットフォーム。点群の分類、地形生成、森林解析など、膨大なデータを価値ある成果物へと昇華。
●LiDAR360MLS: 移動体計測に特化した解析。道路インフラの管理を劇的に効率化します。
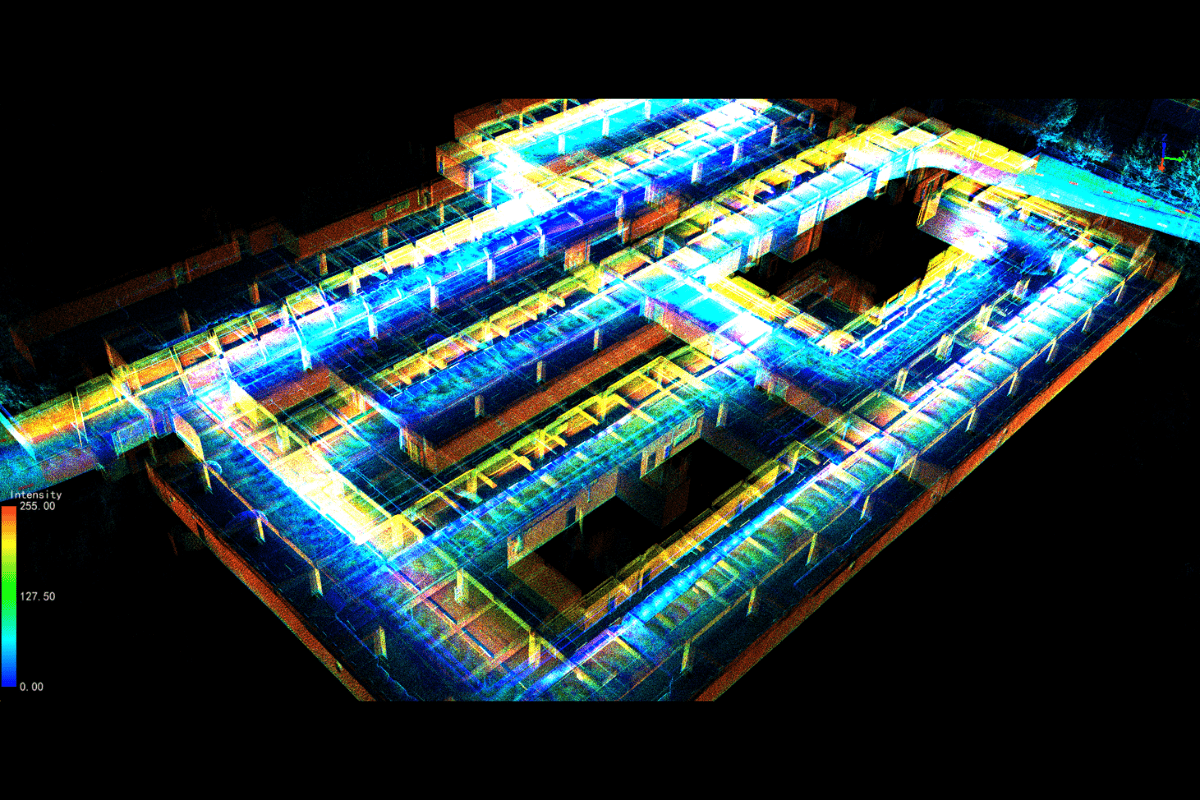
高密度着色点群
MLF-SLAMによる位置合わせと、高画素カメラの融合により、テクスチャの細部まで再現。CAD化やBIMモデル作成の際、現地の状況を写真のように確認できます。
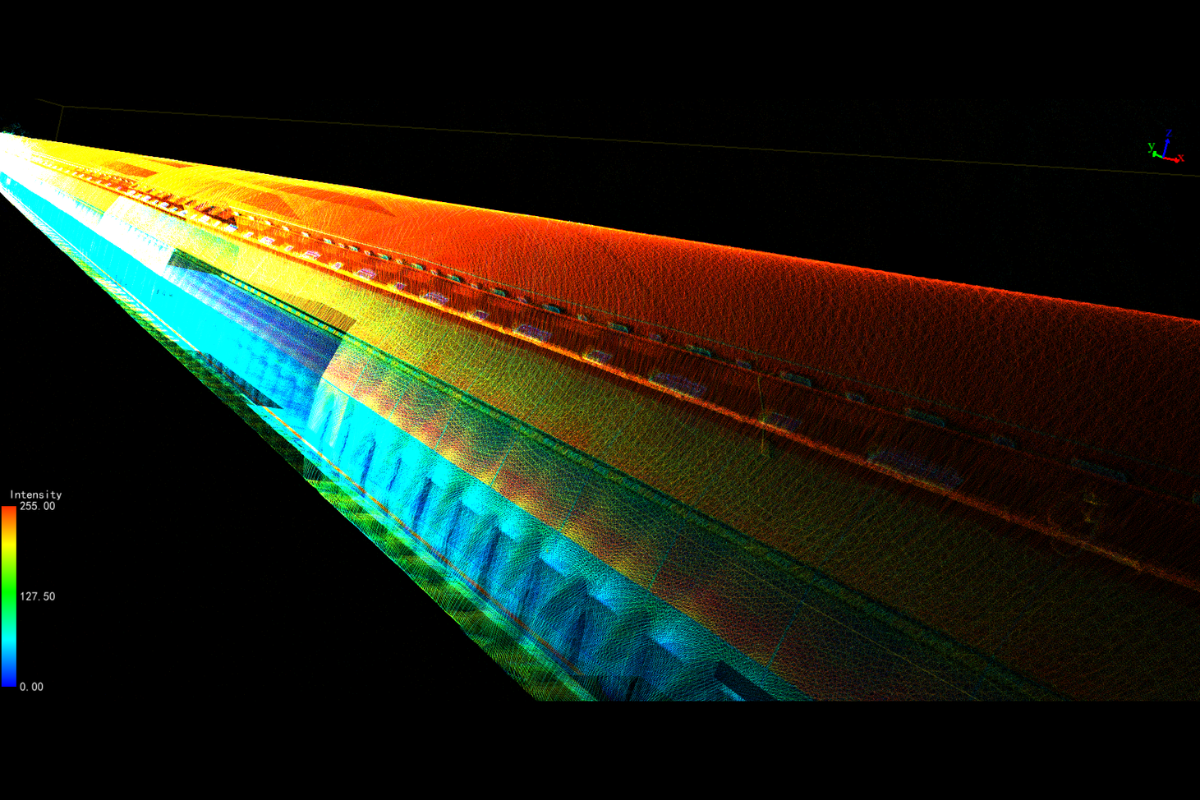
長距離計測データ

森林・樹冠計測

現場の課題を解決する
LiGrip 02シリーズ導入効果を追う
1. どんな場所でも「迷わない」—— 圧倒的な自己位置推定の安定性
これまでのSLAM技術には、大きな弱点がありました。それは、特徴のない長いトンネル、広大な道路、単調な河川敷といった「変化の少ない環境」です。こうした現場では、センサーが自分の位置を見失う「スキャン迷子」が発生し、データが二重に重なったり途切れたりして、結局は現場での再計測を余儀なくされていました。
LiGrip 02シリーズは、この課題を最新のMLF-SLAM(マルチセンサー融合)で解決します。LIDARの形状認識に加え、カメラ、GNSS、IMU(慣性計測装置)の情報を高度に統合。単調な空間であっても、システムが常に自分の位置を正確に追跡(ロバスト・トラッキング)し続けます。これにより、一回の歩行で歪みのない完璧な3Dモデルが完成し、「現場でのやり直し」という無駄をゼロにします。
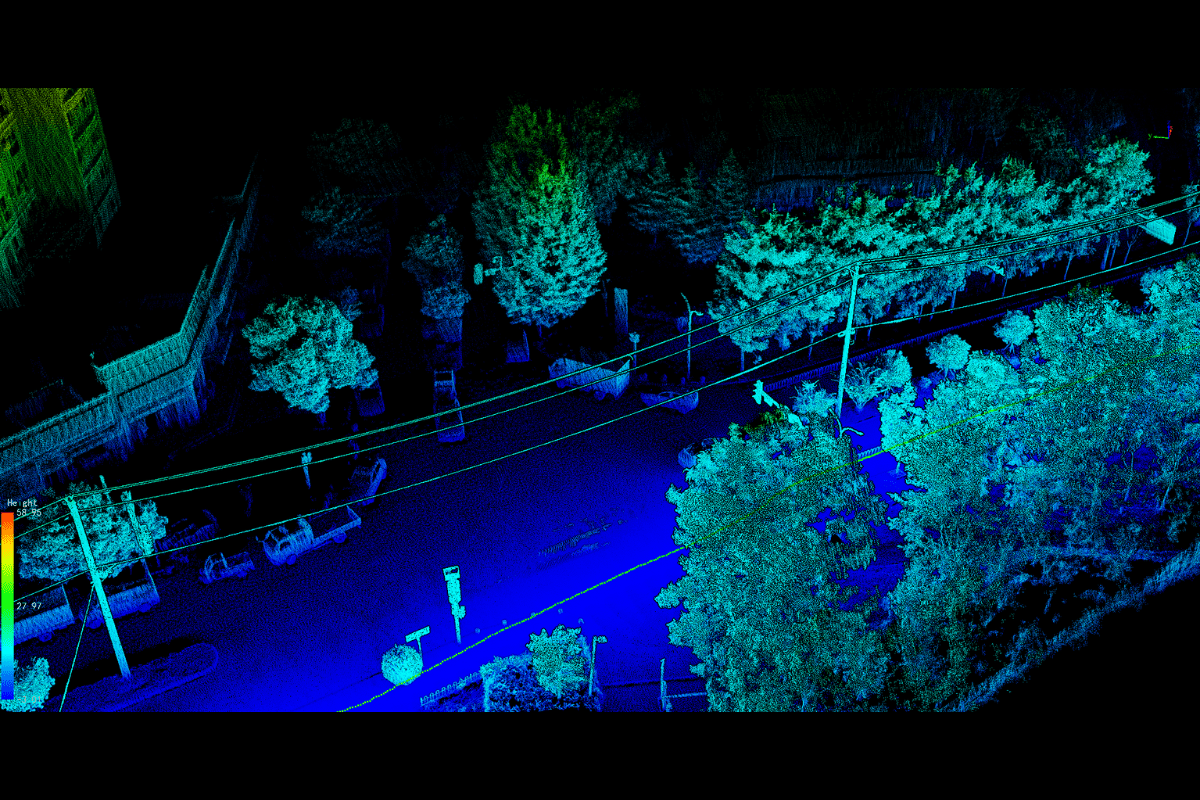
従来の点群データは、形状こそ正確でも「何が映っているか」の判別が困難でした。モノクロの点群だけでは、それが電線なのか樹木なのか、あるいは看板に何と書かれているのかを特定するために、結局は現場で撮った写真と見比べながら作業するという、二度手間が発生していました。
LiGrip 02(上位モデル)は、24MPという極めて高い解像度を持つカメラを搭載。取得した点群に、実写さながらのリアルな色情報を瞬時に付与します。PCの画面上で、対象物の材質や微細な文字まで一目で判別できるようになるため、オフィスに戻った後のデスクワークが劇的に効率化。現場をそのままデジタル空間に持ち帰る感覚で、直感的な解析と図面化を可能にします。
3.「一機多役」の機動力ーー あらゆる現場に即応するマルチプラットフォーム
これまでの計測業務において、現場の状況に合わせた機材の使い分けは大きな負担でした。狭い屋内はハンドヘルド、広域は車載、アクセス困難な場所はドローンと、複数の高価な機材を揃えるコストや操作習得の手間が、現場の生産性を阻む壁となっていました。
LiGrip 02シリーズは、この常識を「モジュール構造」による圧倒的な拡張性で打ち破ります。基本のハンドヘルド形式を核に、バックパック、伸縮ポール、車載、さらにはUAV搭載まで、わずかなセッティング変更で自在にトランスフォームが可能です。一組の機材で広大な現場から入り組んだ路地までを網羅し、機材投資を最小限に抑えつつ、あらゆる顧客ニーズへ柔軟に適応する「現場適応型」ソリューションを実現します。
あらゆる技術を融合させ
イノベーションの限界を押し広げる
その最前線に、LiGrip O2
推奨業界
鉱業
採掘・トンネル
地形調査
ユーティリティ
マッピング
電力線調査
林業調査